�@�@�@�@�@�@�@�@�@�@�@�@�r�c�J�[�h�������� �f�o�r���K�[
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�i�Q�l�����j�@�E�@�o�h�b�Ŋy���ނt�r�a�@��i����V�Łj�@��ՓN�� ���@�Z�p�]�_�� 2011 9
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�E�@�J�V�~�[���R�c�E�f�o�r���p�ҁ@���{�q�F ���@���ƔV���{�Ё@2011 5
�@�@�f�o�r���W���[�����m�[�g�p�\�R�����ɏ�ɂȂ��Ďg�p����ꍇ�́A�r�c�J�[�h���̋L�^�}�͕̂K�������K�v�Ȃ����A�����ł� �t���[�̏����W���u�Ƃ��āA��U �r�c�J�[�h�������ɏ����X�g�b�N���āA�o�b�ɂȂ����Ƃ��ɁA�o�b���̑���� �f�o�r���i�ʒu�A���x�j����荞�ތ`�ɂ���B
�@�@�r�c�J�[�h�A�}�C�N���r�c�J�[�h�̓���d���� �Q�D�V�u�`�R�D�U�u�ƂȂ��Ă��āA����̂قƂ�ǂ̋@����R�D�R�u���삷��B�i���@�T�u�n�̃}�C�R���ł͊ԂɃ��x���ϊ����K�v�ƂȂ�B�r�c�J�[�h�ƃ}�C�R���Ԃ̒ʐM�� �r�o�h �j
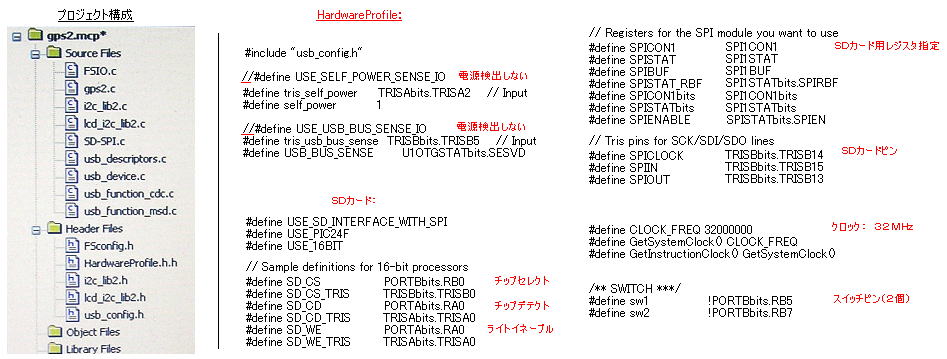
�@�@���̂��߁A�f�o�r���W���[���iGM-316�j���A�d���R�`�U�u�A�o�͂R�D�R�u�ł��邱�Ƃ��l�����āA�}�C�R���́A�o�h�b�Q�S�e�i�U�S�f�a�O�O�Q �i�Q�W �s���A�d���R�D�R�u�A�P�U �r�b�g�E�}�C�R���A�W�l�g�����U�� �R�Q�l�g������N���b�N�A�v���O�����E�t���b�V�������� �U�S���a �E�E�E�E ���Ȃ葬���A�e�ʂ��傫���j��p����B �s���̃C���^�[�t�F�[�X�� �t�r�a�Ȃǂ� �T�u�ɂ��Ή��B�@�i�@���j �o�h�b�Q�S�e�i�f�`�O�O�Q �� �t�r�a�����A�@���݁A�H���d�q�ʏ��Ŕ����Ă���PIC24FJ64GA002��I2C���Łi�h2�b �̂b���P�ɃG���[�^�i���ׁj��ςݕi�j�j
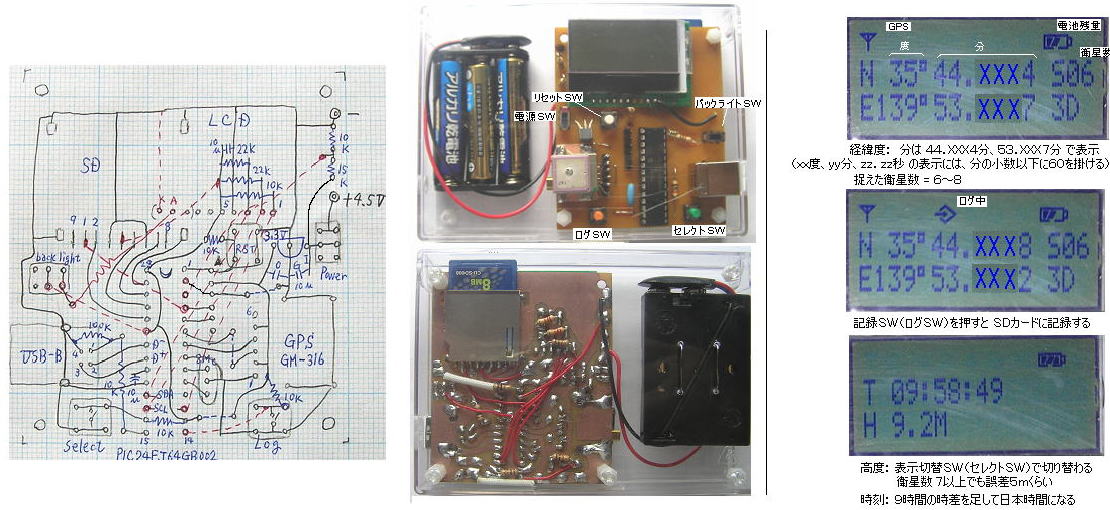
�@�@�܂��A�S�̂̎����^�т��֗��Ȃ悤�ɁA�d�r�P�[�X�i�P�S�~�R�j������Ă`�a�r�����P�[�X�i�P�P�V���W�S���Q�W�A���ԊW�t���j�Ɏ��܂�悤�R���p�N�g�ɂ��邽�߂ɁA���j�^�[�p�� �k�b�c�� �R�D�R�u�A�h2�b�ʐM�i�}�C�R���̃s���ߖ�j�A���A��������ɏ�� SB1602BW�i�o�b�N���C�g�t���j�i�����ذ�ů���j��p�����B�i�s���̔��Α��̌Œ�̓G�|�L�V�Łj
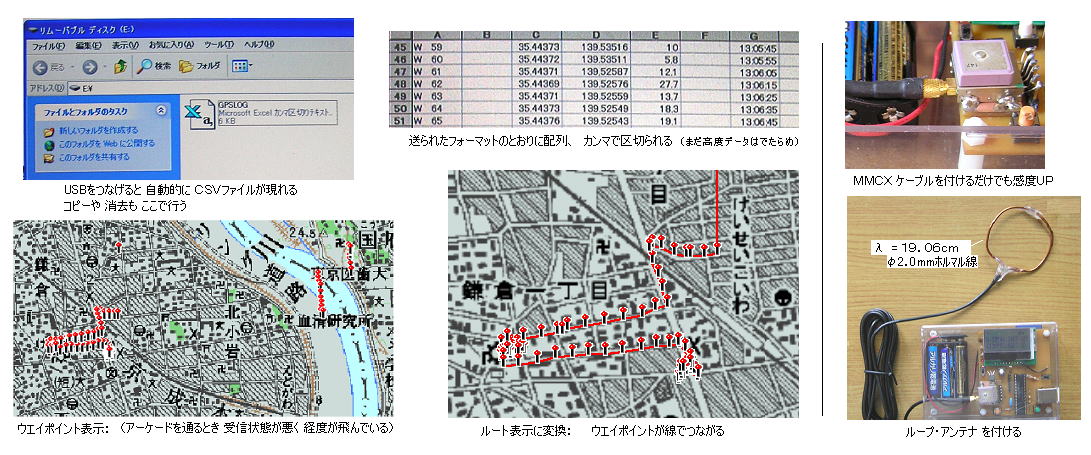
�@�@�o�h�b�}�C�R���� �t�r�a�ʐM�N���X�́A�l�r�c�iMass Storage Device�A��e�ʒʐM�j�N���X��p���A�t�r�a���Ȃ����Ƃ��A�o�b���A�b�n�l�|�[�g�Ƃ��Ăł͂Ȃ��A���̂܂������̃f�B�X�N�E�h���C�u�i�������[�o�u���f�B�X�N�j�Ƃ��ĔF������悤�ɂ���B�i���@�lS�c�N���X�ł́A�b�c�b�iCommunication Device Class�A�����ʐM�j�N���X�̏ꍇ�s���A�o�b�ւ́u ������ �t�@�C���v�̔F�����s�v�j�@�f�[�^�� �b�r�u�`���i�G�N�Z���ł������鏑���j�� �o�b�̃t�@�C���Ƃ��Ď�荞�܂�A�t�@�C���̕ۑ��� �r�c�J�[�h�������̏������A�o�b�̃t�@�C������ł��̂܂܍s�����Ƃ��ł���B
�@�@�������A�f�[�^�e�ʂ��傫���̂ŁA�f�o�r�Ή��̒n�}�\�t�g�i�J�V�~�[���R�c�A�b�r�u�f�[�^���p�j�p���A���̂��߂ɁA���炩���ߑ��u�̕��ŁA�L�^����f�[�^�̒i�K���t�H�[�}�b�g�����킹�Ă����K�v������B
�@

�@
�@�@�P�D�@���ӑ��u�̎d�l�F
�@�@�i�P�j�@�f�o�r���W���[���F
�@�@�f�o�r���W���[���̏o�̓f�[�^�M���i�P�r�����ɏo�́j�̃t�H�[�}�b�g�́A���̂悤�ɏ��Ԃ����߂��A�q���𑨂���� �R�ԃs������ �t�`�q�s �ŏo�͂�������B
�@�@�o�́F ���������� �s�s�k�C���^�[�t�F�[�X�A�{�[���[�g �S�W�O�O�������i�������T�u���ŁA�s�����t�i�q�o�Q�A�R�j�Ƌ��ɐݒ�j
�@�@�@�@�@�f�o�f�f�`�F�@$GPGGA, hhmmss.sss, ddmm.mmmm, N/S, dddmm.mmmm, E/W, v, ss, dd.d, hhhhh.h, M, gggg.g, M, XXX.X, 0000*hh <CR> <LF>
�@�@�E�E�E�E�@�ihhmmss.sss ���珇�ɁA�@�X���ԑO�������i�����b�A�č��ECentral ��j�A �ܓx�F �x���A �k��or��܁A �o�x�F �x���A ���oor���o�A ���ʏ���i�� = �P�łf�o�r���ʁj�A �������q�����i���� = �O�O �` �P�Q�j�A �g�c�n�o�l�A �A���e�i���x�i���[�g���j�A �i�P�ʁF �l = ���[�g���j�A �W�I�C�h���x�A �i�l = ���[�g���j�A�E�E�E�E�@�i���s�j�F�@�@�V�V�o�C�g
�@�@�@�@�@�f�o�f�r�`�F�@$GPGSA, A,�@s,�@ xx.xx, xx, �E�E�E , xx, pp.p, hh.h, vv.v*hh <CR> <LF>
�@�@�E�E�E�E�@�i�@�� = ���ʏ���i�P�F���ʕs�A�Q�F�Q�������ʁA�R�F�R�������ʁi����j�A�@�E�E�E�E�@�i���s�j�j�F�@�@�S�V�o�C�g
�@�@�@�@�@�f�o�f�r�u�F�@�i�ȗ��j�F�@�@�U�O�o�C�g�i�T�b�ɂP��j
�@�@�@�@�@�f�o�q�l�b�F�@�i�ȗ��j�F�@�@�V�Q�o�C�g
�@�@�@�@�@�f�o�u�s�f�F�@$GPVTG, hhh.hh, T,, M, nnn.nn, N, ssss.ss, K*hh <CR> <LF>
�@�@�E�E�E�E�@���������D���� = ���x�i����/���j�A�@�E�E�E�E�F�@�@�R�W�o�C�g
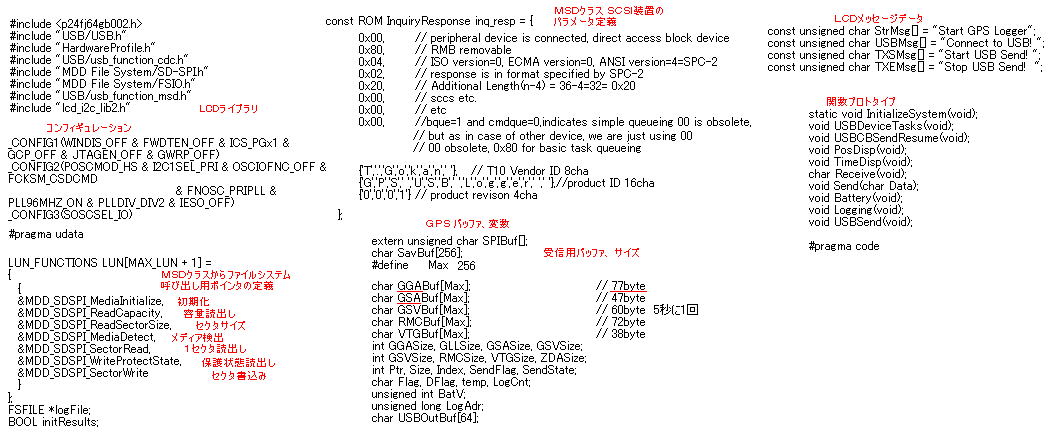
�@�@�����̃f�[�^�́A��x�A��M�o�b�t�@�ɂ��ׂĊi�[����B
�@�@�i�Q�j�@�r�c�J�[�h�F
�@�@�r�o�h �C���^�[�t�F�[�X���g�p����B����� �v���O�������t�@�C���V�X�e���Ɋ܂܂�Ă���i�e�r�h�n�D���A �r�c-�r�o�h�D���A �e�r�����������D���j�̂ŁA���ɍ쐬�s�v�B
�@�@�J�[�h�̗e�ʂ́A�n�}��Ƀs���|�C���g��\������悤 �P�����ƂɃf�[�^���L�^����悤�ɂ����̂ŁA�Ƃ肠���� �W�l�o�C�g�̒�e�ʂ̂r�c�J�[�h���g�p�������A�����ԓ������œ����Ȃ� �P�b���Ƃɒ����ԃg���[�X����悤�ȏꍇ�́A���f�o�C�g���x�̗e�ʂ̂��̂��K�v�Ǝv����B
�@�@�i�R�j�@�h2�b �k�b�c�F
�@�@�k�b�c�� �r�a�P�U�O�Q�a�v�i�R�D�R�u�A�P�U�����~�Q�s�A�o�b�N���C�g�t���A�����ذ�ů���j�ŁA�W �r�b�g���[�h�ŁA�A�C�R���\�����g�p����B �v���W�F�N�g�t�H���_�ɁA��2�b_�������Q�D���A ������_���Q��_�������Q�D���A ��2�b_�������Q�D���A ������_��2��_�������Q�D�� ��lj�����B
�@�@�E�@�s���ڑ��F�@�P�F�@�q�r�s�i���_���̃��Z�b�g�j�A�@�Q�F�@�r�b�k�i = �h2�b �N���b�N�j�A�@�R�F�@�r�c�`�i = �h2�b �f�[�^�j�A�@�S�F �f�m�c�A�@�T�F �u�����i�Q�D�T�`�R�D�U�u�j�A�@�i�U�F �b�`�o�{�A�@�V�F �b�`�o�|�A�@�W�F �u�������A�j�@�X�F �i�o�b�N���C�g�́j�`�A�@�P�O�F �i���j�j
�@�@�E�@�h2�b �N���b�N�F�@������ �S�O�O���g���A�@�@�h2�b �A�h���X�F�@�O���O�P�P�P�P�P�O �i�V�r�b�g�A�Œ�A�h���X�j�A�@�@�X�^�[�g�M���F�@�r�A�@�X�g�b�v�M���F�@�o�A�@�`�b�j�F �k�b�c����̉���
�@�@�E�@�h2�b �f�[�^�t�H�[�}�b�g�F
�@�@�@

�@�@�E�@����R�}���h�F�@�@�c�a���O �` �V�F�@�S�����F�@00000001�i�O���O�P�j�A�@�J�[�\�� �z�[���F�@00000010 �i�O���O�Q�j�A�@�����݃��[�h�F�@0 0 0 0 0 1 I/D S �iI/D:�@�\���A�h���X���@�O�Ł{�P�A�P�Ł|�P�A�@�r: �P�ŕ\���S�̃V�t�g�A�O�ł��Ȃ��j�A�@�\������F�@0 0 0 0 1 D C B �iD: �P�ŕ\���n�m�A�@�b: �P�ŃJ�[�\���n�m�A�@�a: �P�Ńu�����N�n�m�j�A�@�@�\����F�@0 0 1 DL N DH 0 IS �iDL: �P�łW �r�b�g���[�h�A�O�łS �r�b�g���[�h�A�@N: �P�łP/�U�f���[�e�B�[�A�O�łP/�W�f���[�e�B�[�A�@�c�g: �P�Ŕ{�������A�O�ŕW�������A�@�h�r: �g���R�}���h�i���j�A�@�s�̕\���������A�h���X�F�@1 (DDRAM���ڽ�i�V�r�b�g�j)�@�i�P�s��: �O���O�O�`�O���P�R�A �Q�s��: �O���S�O�`�O���T�R�j
�@�@���@�g������R�}���h�F�@�h�r���O�̏ꍇ�F�@�J�[�\���V�t�g�F�@0 0 0 1 S/C R/L * *�@�i�r/�b: �P�ŕ\�����V�t�g�A�O�ŃJ�[�\���̂݃V�t�g�j�A�@�q/�k: �P�ʼnE�A�O�ō��j�A�@�����������A�h���X�F�@0 1 (CGRAM���ڽ) �@�A�@�h�r���P�̏ꍇ�F�@�o�C�A�X�Ɠ����N���b�N�F�@0 0 0 1 BS F2 F1 F�A�@�d���E�A�C�R������F�@0 1 0 1 IO BO C5 C4�@�i�h�n: �P�ŃA�C�R���\���n�m�A�@�a�n: �P�œd���u�[�X�^�[�n�m�A�@�b�T�A�b�S: �R���g���X�g����j�A�@�t�H��������F�@0 1 1 0 F0 R<2:0>�A�@�A�C�R���A�h���X�F�@0 1 0 0 AC<3:0> �i�����j�A�@�R���g���X�g�ݒ�F�@0 1 1 1 C<3:0>
�@�@�����@�A�C�R������A�h���X�iAC<3:0> �̂����@�A�C�R���A�h���X �R�r�b�g�A�A�C�R���q�`�l �P�r�b�g�j�F�@�A���e�i�}�[�N�F�@00H D4�A�@��M�}�[�N�F�@04H D4�A�@���O�}�[�N�F�@06H D4�A�@�d�r�c�ʃ}�[�N�F�@0DH D4�`D1�A�@�Ȃ�
�@�@�E�@�k�b�c�������菇�F�@�d���n�m�@���@�P�O�O���r�i�S�O���r�ȏ�j�@���@�O���R�W�F �W���E�W�r�b�g���[�h�@���@�O���R�X�F �g���E�W�r�b�g���[�h�@���@�O���P�S�F �N���b�N �P/�T�o�C�A�X�A�R�W�O���g���@���@�O���V�Q�F �R���g���X�g�ݒ�@���@�O���T�d�F �d���E�A�C�R���E�R���g���X�g�@���@�O���U�a�F �t�H��������@���@�R�O�O���r�i�Q�O�O���r�ȏ�j�@���@�O���R�W�F �i������x�j�W���E�W�r�b�g���[�h�@���@�O���O�b�F �\���n�m�@���@�O���O�P�F �S�����i�N�����j�@���@�Q���r�ȏ�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�E�E�E�E�E�@�@�쐬�t�@�C���Q�ƁF�@��2�b_�������Q�D���A ������_���Q��_�������Q�D���A ��2�b_�������Q�D���A ������_��2��_�������Q�D���@�i���j
�@�@�Q�D�@�}�C�R���E�v���O�����F
�@�@�o�h�b�Q�S�e�i�U�S�f�a�O�O�Q ���������߂ɁA�u�o�h�b�Q�S�e �� �����o�h�b �p�� �b �R���p�C���v ��V���Ƀ_�E�����[�h����K�v������B �J������ �l�o�k�`�a �h�c�d�i�� �W�D�W�S�j�́A�W�r�b�g�`�R�Q�r�b�g�ŁA���̂܂g�����Ƃ��ł���B�@�i�v���O���}�́A�o�h�b�������Q�A�܂��́A�R �j
�@�@�E�@�]���Łi�����j�̃_�E�����[�h�F�@�}�C�N���`�b�v�̂g�o�ihttp://www.microchip.com/�j����A�@DesignSupport�@���́@Deveropement Tools�@���@Software�@���́@�b�����������������@���@�d�������������������i�y�[�W�����j�Ł@�R���p�C����I�����A�r������ ���� ���Ă���_�E�����[�h�B
�@�@�i�P�j�@�v���W�F�N�g�\���� �n�[�h�E�F�A�v���t�@�C���F
�@�@�t�r�a�A�t�`�q�s�A�r�o�h�A �h2�b �Ƃ��� �S�̈قȂ�ʐM����̃v���O�����ɂ܂Ƃ߂邽�߁A�K�v�ȃ\�[�X�t�@�C���� �w�b�_�[�t�@�C�������ׂĎ�荞�ޕK�v������B
�@
�@�@�v���W�F�N�g�̃t�H���_��݂��AMicrochip �t�H���_�iIncude�AMDD File System�AUSB �̂R�̃t�H���_�܂ށj������Ă����B�i�����̂b�c�ɂ͓����Ă���B�o�[�W�����s���j
�v���W�F�N�g�t�H���_�ɁA�\�����[�V�����F Microchip Application Libraries ��2011-06-02 �i���݂̓A�[�J�C�u�������ł���j����A���@�t�r�a�@���@�c���������|�b�����������������|�l�r�c�{�b�c�b�@���@�e���������������@���@usb_descriputors�D���A�@usb_config�D���A�@HardwareProfile_PIC24FJ256GB110PIM�D���A�@�e�rconfig�D���A�̂S�t�@�C�����R�s�[���AHardwareProfile_PIC24FJ256GB110PIM�D�� �� HardwareProfile�D�� �ɖ��O��ς��Ă����B
�@�@�܂��A�h2�b �k�b�c�W�̃��C�u�����[�̂S�t�@�C���i��2�b_�������Q�D���A������_���Q��_�������Q�D���A ��2�b_�������Q�D���A ������_��2��_�������Q�D���j���A���L�̃����N���� �t�H���_�ɃR�s�[���Ă����B
�@�@�@�@�@���@�@��2�b_�������Q�D���A�@�@������_���Q��_�������Q�D���A�@�@ ��2�b_�������Q�D���A�@�@ ������_��2��_�������Q�D��
�@�@��L�� Microchip �t�H���_����@���@�t�r�a�@���@usb_device�D���A�@�t�r�a�@���@�l�r�c �c���������c�����������@���@usb_functuion_msd�D���A�@�t�r�a�@���@�b�c�b �c�����������c�����������@���@usb_function_cdc�D���@�A�@�܂��A�l�c�c�e���������r�����������@���@�e�r�h�n�D���A�@�r�c_�r�o�h�D���@���A�v���W�F�N�g�� Source Files�AHeader Files �ɉ����A���}�̃v���W�F�N�g�\���Ƃ���B
�@�@�p�X�̐ݒ�́A�@�o�������������@���@�a���������n�������������@���@�o�������������@���@�c���������������������̃^�u�I���@���@�r������ ���������������������� �������̗��ŁA�e�t�H���_�������Ă���f�B���N�g���[�ɂȂ���B
�@�@�@�P�j�@�n���������� �c���������������������@�Q�j�@�h���������������������� �c���������������������@�Ɂ@�b�F���w�w�w���������i�������̓t�H���_���F�����ł͂������S�j��lj��A�@�R�j�@�h������������ �r���������� �o������ �ɂ́A�@�b�F���w�w�w���������A�@�b�F���w�w�w�����������l�������������������h�������������A�@�b�F���o�������������e�����������l�������������������l�o�k�`�a �b�R�O�������������������o�h�b�Q�S�e�����@�̂R��lj��A�@�S�j�@�k�������������r���������o�������@�ɂ́A�@�b�F���o�������������e�����������l�������������������l�o�k�`�a �b�R�O���������@��lj�����B
�@�@�@
�@�@�i�Q�j�@���[�U�[�A�v�����̐錾���F
�@�@�l�r�c�N���X�ł́A�f�t�H���g�ŁA�r�c�������J�[�h�Ƃ����L�����u�� �r�b�r�h�i�X�J�W�[�j�@���i���Ӌ@���ڑ����鏬�K�̓V�X�e���̃C���^�t�F�[�X�E��]�W�ł͂Ȃ��Γ��Ƃ���j�Ƃ��Ĉ������߁A�l�r�c�N���X���璼�� �t�@�C���V�X�e�����̊����Ăяo�����|�C���^�̃��X�g�ƁA�r�b�r�h�@����p�����[�^�̒�`��t��������B����ŁA�p�\�R�����r�c�J�[�h�� ���g�̎��Ӌ@��Ƃ��ĔF�����A�p�\�R���̃t�@�C������Œ��ڈ����邱�ƂɂȂ�B�i���@�f�t�H���g�̂܂܃R�s�[���Ďg���B�������͎��R�ɏ��������j
�@
�@�@�i�R�j�@���C�����F
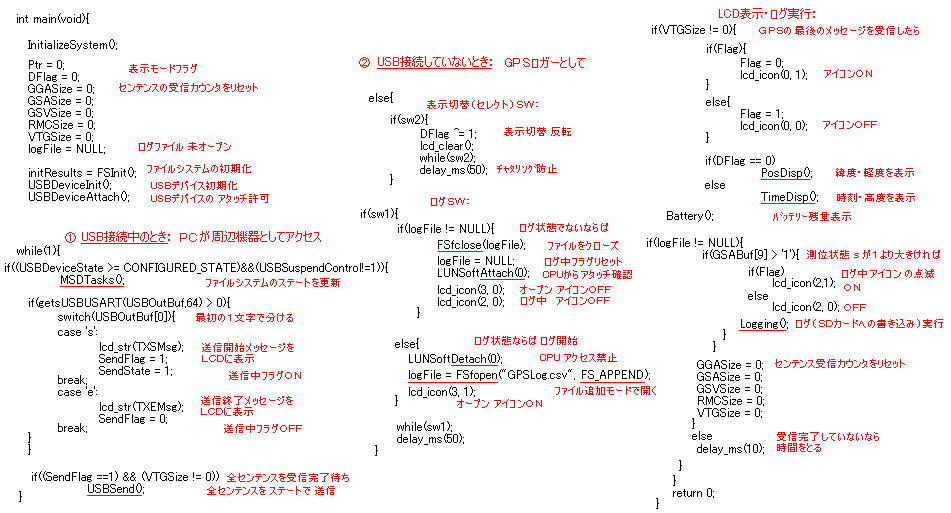
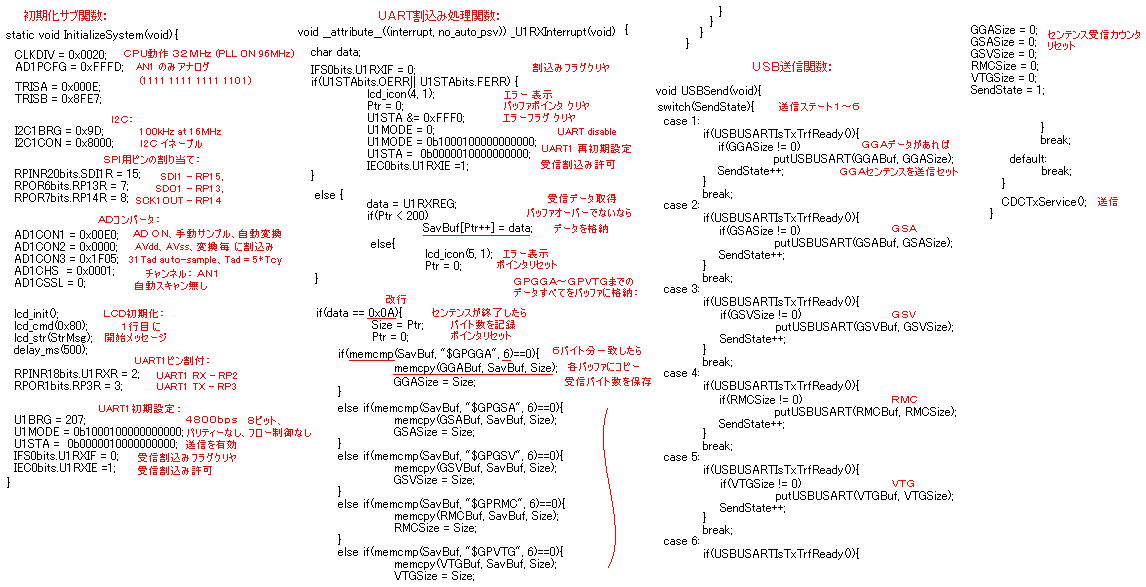
�@�@�t�r�a�ڑ����� �����łȂ��ꍇ�ɕ����A�@�@�@�t�r�a�ڑ����ɂ́A�l�r�c�s���������i�j�����s���ăt�@�C���V�X�e���̃X�e�[�g��i�߂�Ɠ����ɁA���̊Ԃ� �p�\�R������ �r�c�J�[�h�ւ̃A�N�Z�X���s����B�@��M�`�F�b�N��A���M�t���O�n�m ���� ��M�����Ȃ�A�S�Z���e���X�� �t�r�a�ő��M����B�i�t�r�a�r�������i�j �� �U�S�o�C�g�𑗐M���A���̂��тɃ��C�����[�v���J��Ԃ��j
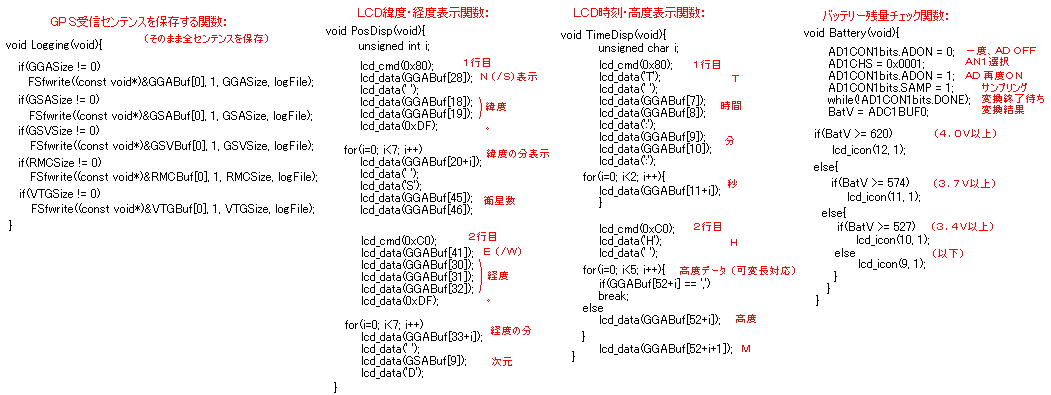
�@�@�A�@�t�r�a�ɐڑ����Ă��Ȃ��ꍇ�́A�f�o�r���K�[�Ƃ��ċ@�\����B�@���O�̎��́A�p�\�R������̃A�N�Z�X���֎~���A�t�@�C���� �u�NjL���[�h�ŃI�[�v���v�i�������`���j �̏�Ԃɂ���B �f�o�r�̍Ō�̃��b�Z�[�W�i�f�o�u�s�f�A�u�s�f������������M�o�C�g���j����M������A�f�o�r��M�o�b�t�@�̓��e����A�o�x�E�ܓx / �����E���x �Ȃǂ� �k�b�c�ɕ\������B�@���ʏ�ԁi�f�o�f�r�`�̂X�ԖځF �� �j���P�c�����傫����A���O�i�t�@�C���ւ̏������݁j�����s����B
�@�@�i���@���j�@�\�����[�V�����̂Q�O�P�Q�łł́A�����́@�t�@�C���lj����[�h�ŊJ���F�@�e�r���n�o�d�m�i�@�j�� �`�o�o�d�m�c�@���@�e�r_�`�o�o�d�m�c �ɏC���j
�@�@
�@�@�i�S�j�@�T�u���Q�F
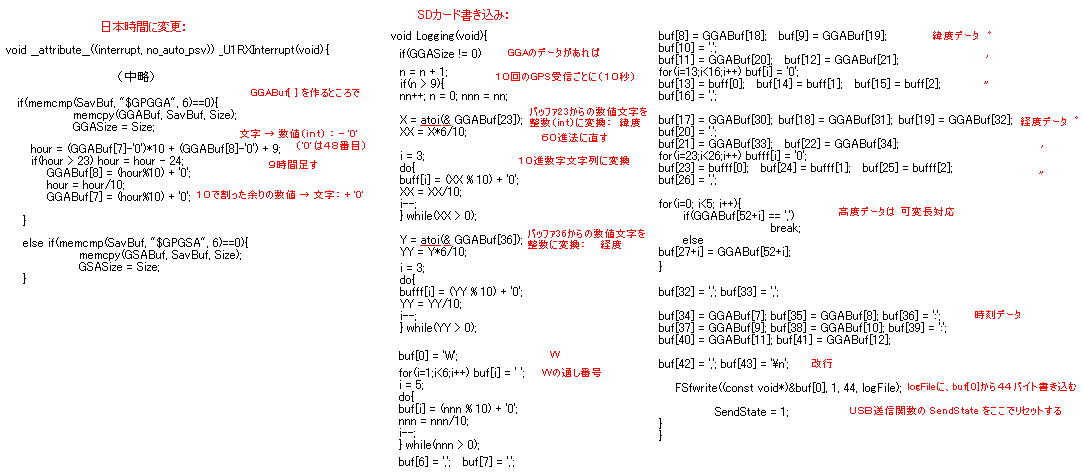
�@�@�Ƃ肠�����A�t�`�q�s��M�o�b�t�@�Ɏ�荞�܂ꂽ �f�o�r�f�[�^�̂��ׂĂ� �r�c�J�[�h�t�@�C���ɃR�s�[�����̂ŁA�o�b�ɑ�����t�@�C���̃f�[�^�t�H�[�}�b�g�́A�J�V�~�[���R�c�ƍ����Ă��Ȃ��B�t�H�[�}�b�g�����킹�邽�߂ɂ́A�R�s�[�̓��e���C������K�v������B�i�@���@�R�D�j
�@�@�f�o�r���W���[�������M�����f�[�^�́A��x��M�o�b�t�@�iSavBuf�j�ɓ����B�@UART�����ݏ��������ł́A
�@�@�E�@�������� �� �h�O���O�`�h�i�����s�j�ɗ������_�ŃZ���e���X�̏I���Ɣ��f���A�o�C�g���� �|�C���^�����Z�b�g���A
�@�@�E�@if (memcmp (SavBuf, "$GPGGA", 6) == 0 �F SavBuf �̍ŏ��̂U�����i�U�o�C�g���j�� "$GPGGA"�ɓ������i�߂�l�F�O�j�A�Ȃ�AGGABuf �ɏ������ނ��ƂŁA�i�������l�ɁA�j�e�Z���e���X���e�o�b�t�@�ɕ��ʂ���B
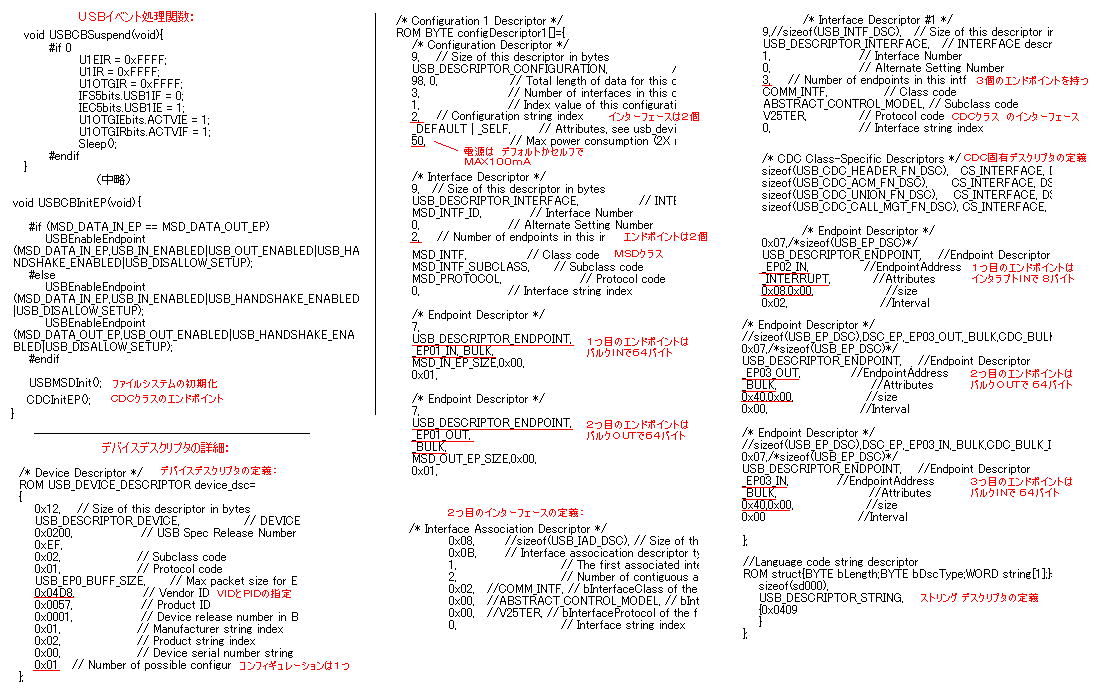
�@�@�i�T�j�@�t�r�a�C�x���g�������A�f�X�N���v�^�̏ڍׁF
�@�@�l�r�c�N���X�� �b�c�b�N���X�̗������G���h�|�C���g������������K�v������̂ŁA�t�r�a�C�x���g���������肩��R�s�[���ă��C���v���O�������lj�����B
�@�@�܂��Ausb_descriptors.c ���A�l�r�c�N���X�ŁA�G���h�|�C���g���Q�����A�Q�̃o���N�]�����[�h�̃G���h�|�C���g�� �h�m�F�U�S�o�C�g �� �n�t�s�F�U�S�o�C�g �̂P������`����Ă���B �b�c�b�N���X�ł́A�G���h�|�C���g���R�����A�b�c�b�ŗL�̃f�X�N���v�^����`����A�C���^���v�g�]�����[�h �h�m�F�W�o�C�g�A�o���N�]�����[�h �h�m�F�U�S�o�C�g�A�n�t�s�F�U�S�o�C�g �ƂȂ��Ă���B
�@
�@�@�R�D�@�J�V�~�[���R�c �̂��߂� �t�H�[�}�b�g�ύX�F
�@�@�f�o�r�n�}�\�t�g�i���{�̂ݑΉ��j�J�V�~�[���R�c�őΉ��ł��� �b�r�u�`���́A�����t�H�[�}�b�g�ŗ^������B �e���ڂ̊Ԃɂ� �J���}�i,�j������B�@���̊��ʂ̕����⌅���̑���Ȃ����l�͖����Ă��悢�B�h���́h�́A�t����� �n�}��ŃE�G�C�|�C���g��\������ہA���ɂ��̖��̂�t���邱�Ƃ��ł���B�@���[�g�A�g���b�N�ɂ� �w�b�_��t����B�@
�@�@�܂��A�E�G�C�|�C���g�A���[�g�A�g���b�N�� �����ꂩ��̃f�[�^������A�\�t�g���́@�ҏW�@���@�f�[�^�G�f�B�^�@�̑���� �݂��ɕϊ��\�ŕ\�������B
�@�@�P�j�@�E�G�C�|�C���g�F
�@�@�o�x�A�ܓx�̕\���͂��ׂ��@�������i ���������j�@������ �����D�����@�ɂȂ�̂ŁA�b�̕����̂U�O�i�@�ւ̊��Z���K�v�B
 �@�@�E�E�E�E�@�i�P�j
�@�@�E�E�E�E�@�i�P�j �@�@�@�E�E�E�E�@�i�R�j
�@�@�@�E�E�E�E�@�i�R�j